هفت ماه تا مریخ: نگاهی دقیق به فرایند سفر کاوشگر HX-1 به سیاره سرخ
تا بهحال ناسا تنها سازمان فضایی بوده است که توانسته سطحنشینها و مریخنوردهای خود را به سیارهی سرخ رسانده و آنها را مورد استفاده قرار دهد. در سال ۱۹۷۶، این سازمان موفق شد دو سطحنشین وایکینگ ۱ و ۲ را با موفقیت روی سطح سیارهی سرخ فرود آورد. رقیب اصلی ایالات متحده در رقابت فضایی، اتحاد شوروی، صرفا توانست کاوشگر Mars 3 را به سطح مریخ برساند؛ اما این کاوشگر تنها ۲۰ ثانیه پس از فرود از کار باز ایستاد.
اکنون سازمان فضایی چین در حال آماده شدن برای ارسال اولین کاوشگر خود به مریخ است. کاوشگری که از مدارگرد، سطحنشین و مریخنورد تشکیل شده است. هرچند چینیها طبق معمول از بیان جزئیات خودداری میکنند؛ اما براساس مصاحبهها و سخنرانیهای مربوط به این مأموریت که اخیرا منتشر شدهاند، میتوان به جمعبندیهایی راجع به چگونگی سفر و مکان فرود کاوشگر جدید دست پیدا کرد. در ادامه نگاهی داریم به فرایندهای پرتاب و فرود و محل انتخابی برای فرود کاوشگر.
فرایند پرتاب
سفر XH-1 تا مریخ هفت ماه بهطول میانجامد
براساس اصول مکانیک سماوی، بهترین زمان برای ارسال مأموریتهای مریخ، اواخر ماه ژوئیه سال جاری میلادی است. این محدودیت، به دلیل نیاز به استفاده از دورهی زمانی (پنجرهی پرتاب) انتقالی هوهمان است که براساس آن، هر ۲۶ ماه یکبار مریخ و زمین در موقعیتی نسبت به یکدیگر قرار میگیرند که میتوان با کمترین میزان سوخت سفر به مریخ را به انجام رساند. به همین دلیل، در کنار سازمان فضایی چین، کاوشگر Perseverance ناسا و مدارگرد امارات متحدهی عربی موسوم به «امید» هم در همین بازهی زمانی راهی سیارهی سرخ خواهند شد.
سازمان فضایی چین، کاوشگر Houxing-1 (یا به اختصار HX-1) را بهوسیلهی راکت لانگمارچ ۵ راهی سفری خواهد کرد که حدودا هفت ماه به طول میانجامد. پس از هفت ماه، در فوریهی سال ۲۰۲۱ میلادی، HX-1 با فعال کردن رانشگرهای خود وارد مدار مریخ خواهد شد.
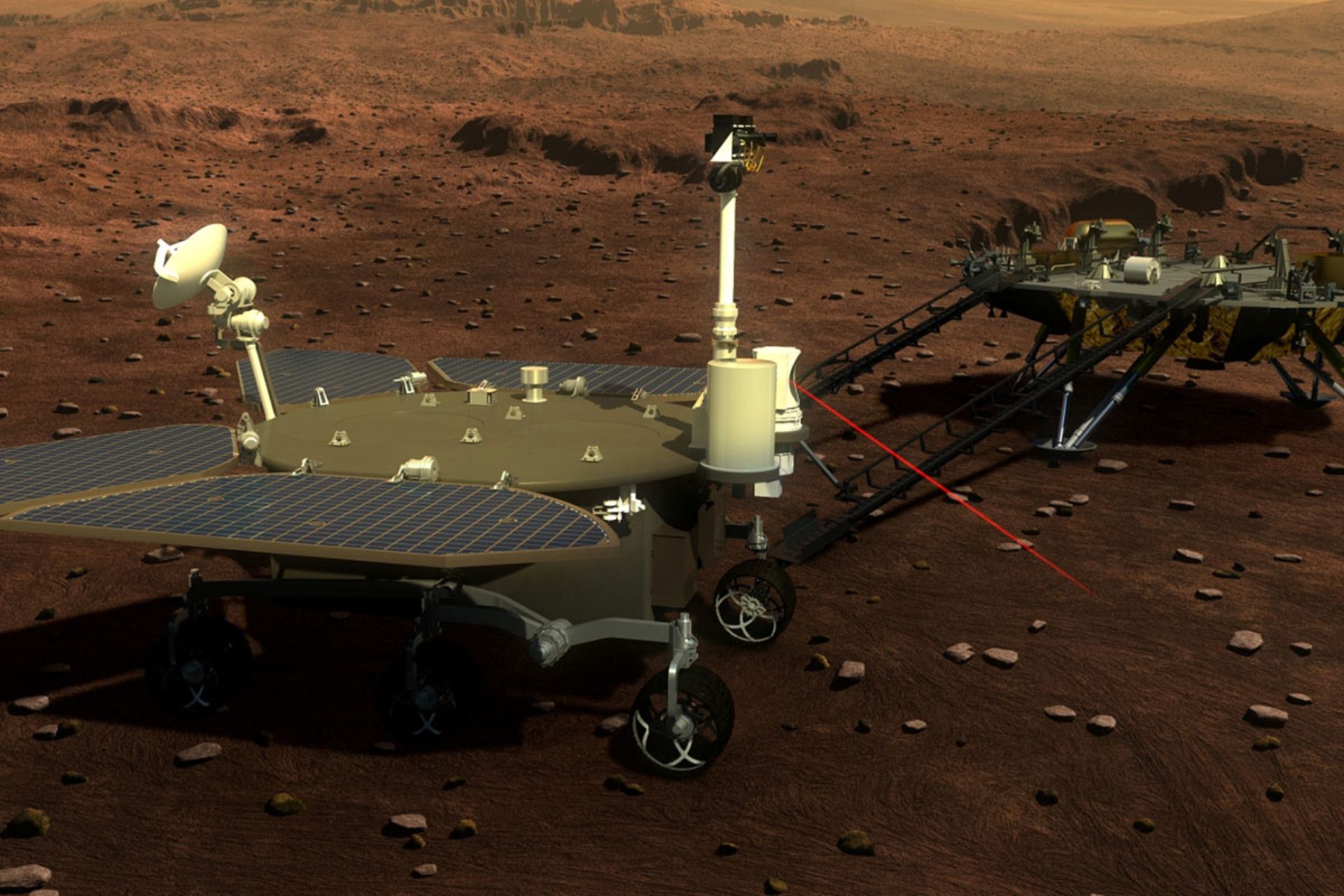
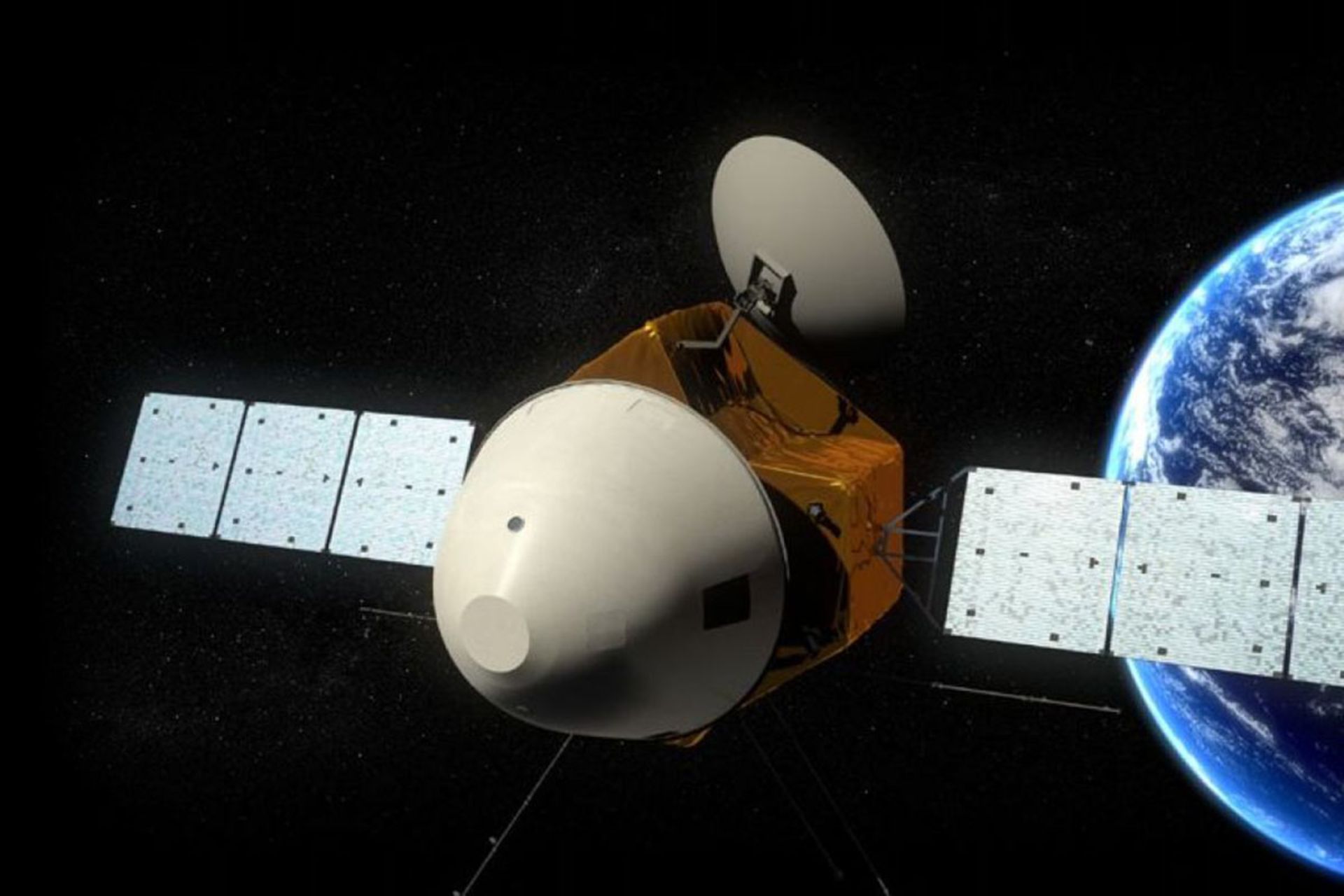
کاوشگر ۵ تنی چینیها از مدارگرد، سطحنشین و مریخنورد تشکیل شده است. همانطور که در تصاویر زیر دیده میشود، مریخنورد در قلب سطحنشین یا همان ماژول فرود جای دارد و این دو درون کپسولی مخروطی شکل قرار میگیرند. این کپسول نیز به مدارگرد متصل است. پس از رسیدن به مدار مریخ، انتظار میرود که سطحنشین و مریخنورد تا ماه آوریل به مدارگرد متصل بمانند. قبل از فرود مریخنورد ۲۴۰ کیلوگرمی روی سطح سیارهی سرخ، دو دوربین نصبشده روی مدارگرد تصویربرداری از منطقهی از پیش تعیینشدهی فرود را شروع خواهند کرد.
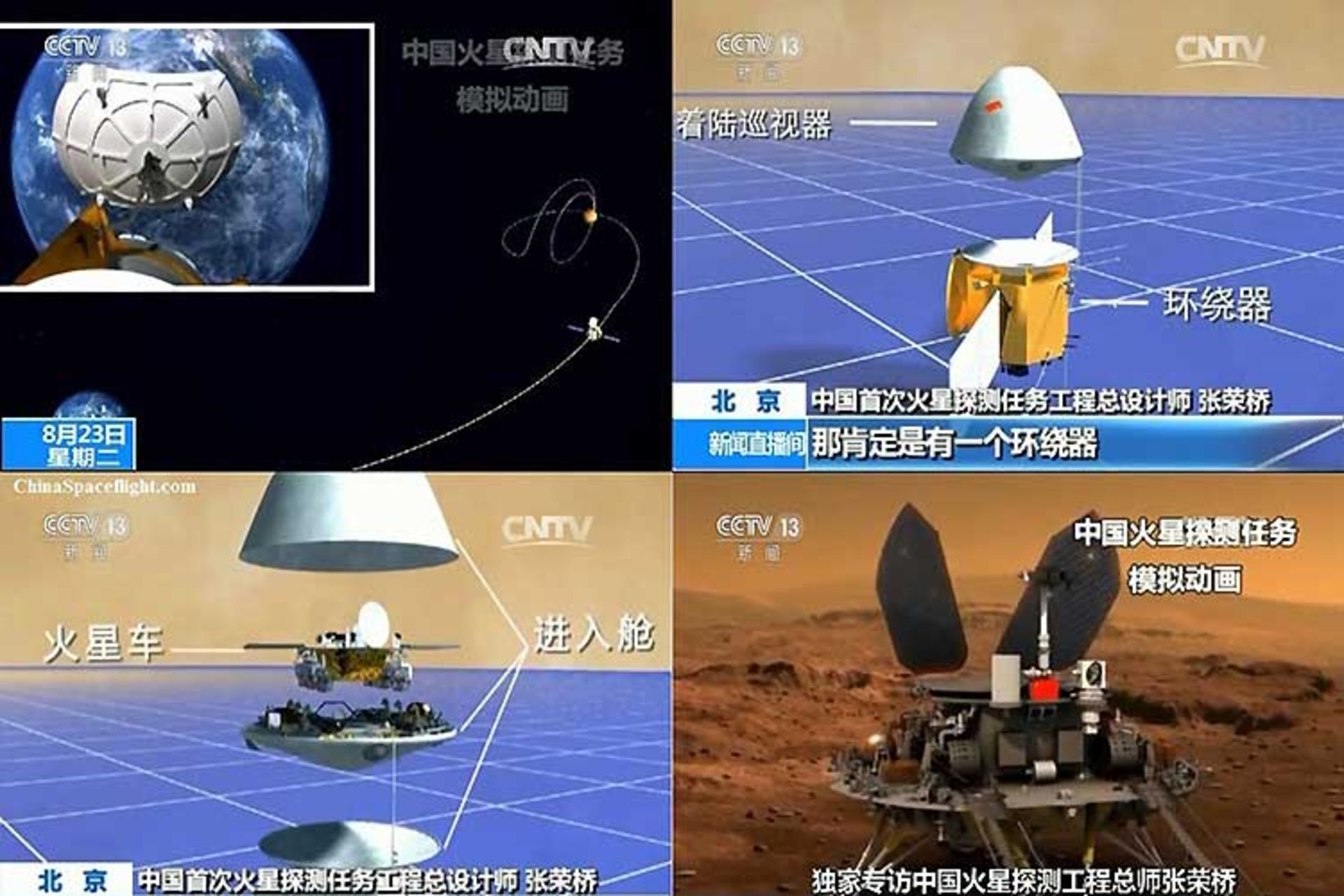
اجزای تشکیلدهندهی HX-1
فرایند فرود
فرود روی مریخ عملیاتی چالشبرانگیز است. اتمسفر رقیق مریخ هرچند کمک چندانی به کاهش سرعت فرود سطحنشین نمیکند؛ اما موجب افزایش شدید دما میگردد. نباید فراموش کرد که میدان گرانشی مریخ نیز متفاوت از زمین است و همین مسئله کار را سخت میکند. با این حال، برخی از تجربیات پیشین دانشمندان چینی، دراینزمینه به یاری آنها میآید.
زمانیکه مدارگرد به مریخ میرسد، زمین و مریخ در فاصلهی ۱۵۰ میلیون کیلومتری قرار دارند، پس ارسال هر سیگنال از سیارهی آبی به سرخ ۸ دقیقه بهطول میانجامد. این بدین معنی است که مسئولیت فرود بعهدهی سیستم هدایت، ناوبری و کنترل (Guidance Navigation and Control System) سطحنشین است که بهاختصار GNC نامیده میشود. این سیستم براساس سیستم هدایت، ناوبری و کنترل کاوشگر Chang'e-4 طراحیشده که در سال ۲۰۱۹ توانست بهصورت خودکار در نیمهی پنهان ماه فرود آید.
چالش بعدی، کاهش سرعت سطحنشین در زمان فرود است. سپر حرارتی منحنیشکل، با زاویهی ۷۰ درجه در دو سو، اولین وسیله برای کاهش سرعت است. در این مرحله، سرعت فرود کیلومترها بر ثانیه است. پس از آن، درحالیکه مدارگرد با سرعت مافوقصوت در حال حرکت است، چتر سرعتگیری با ساختار دیسک-فاصله-نوار (Disk-Gap-Band) فعال میشود تا موجب کاهش سرعت فرود شود. این نوع از چتر سرعتگیر، بهواسطهی توانایی مناسب در ایجاد تعادل و کاهش سرعت، بهطور معمول در چنین مأموریتهایی استفاده میشوند.
پس از کاهش سرعت، این چتر نیز از سطحنشین جدا میشود. چینیها برای طراحی این چتر از تجربهی استفاده از چترهای مشابهی برای فرود فضاپیمای سرنشیندار شنژو استفاده کردهاند. شنژو از چتر دیسک-فاصله-نوار برای رسیدن به سرعت امن جهت فرود فضانوردان روی زمین استفاده میکند.
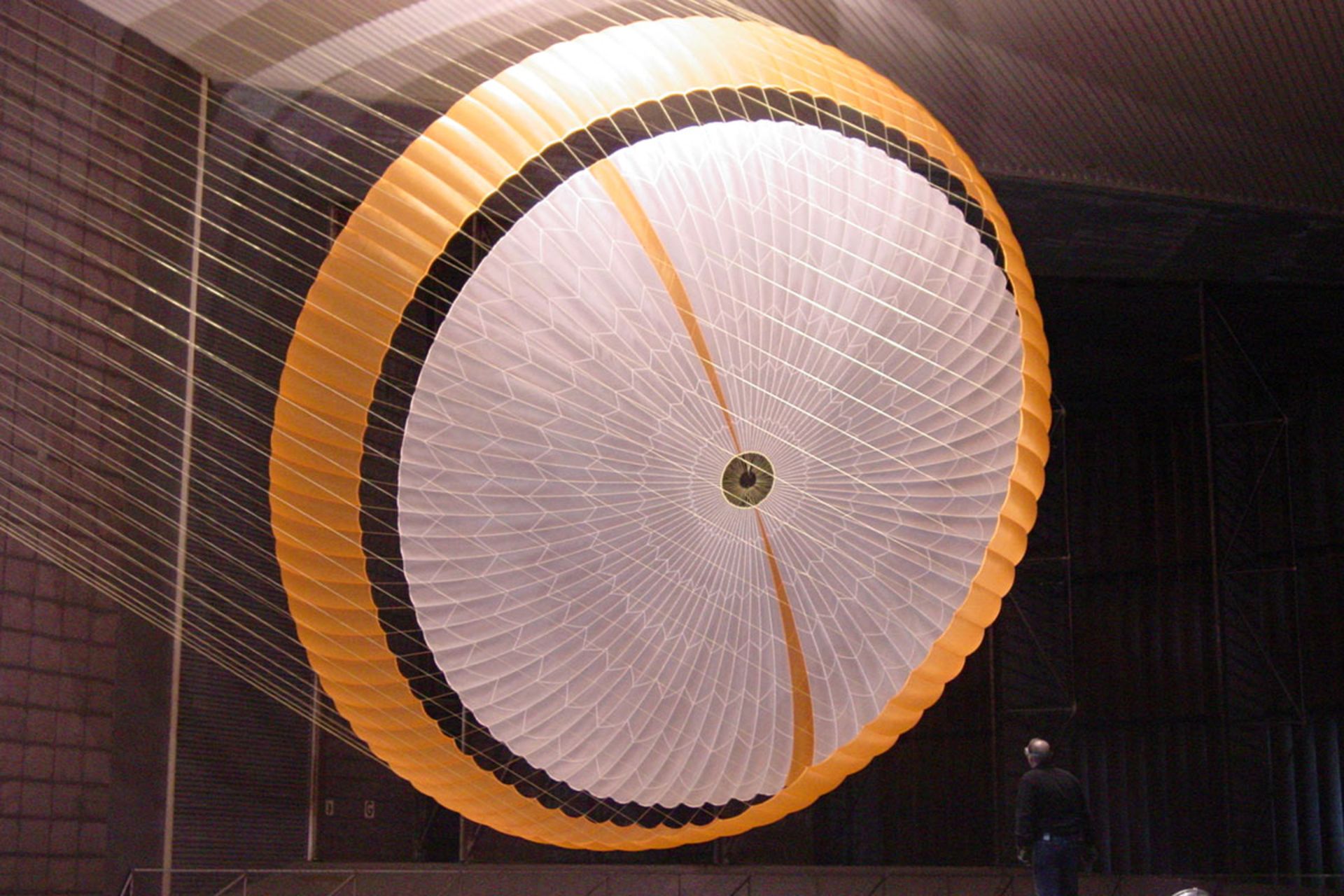
نمونهای از چتر با ساختار دیسک-فاصله-نوار
فرایند فرود خودکار خواهد بود
در لحظات نهایی فرود، از رانش معکوس برای کاهش سرعت فرود استفاده میشود. وظیفهی ایجاد رانش معکوس برعهدهی موتوری با ویژگی رانش متغیر و حداکثر نیروی ۷۵۰۰ نیوتن است که پیش از این بهعنوان موتور اصلی در مأموریتهای Chang'e-3 و Chang'e-4 هم برای فرود روی ماه بهکار رفته است. بهمنظور جمعآوری دادههای ناوبری در زمان فرود، از ترکیب مسافتیاب لیزری و سرعتسنج مسافتی مایکروویو استفاده میشود. فناوریهای مربوط به این ابزارها نیز پیشتر برای مأموریتهای فضایی چین به ماه توسعه یافتهاند.
در زمان فرود روی مریخ، سطحنشین درون یک کپسول قرار دارد. بهگفتهی ژنگ رونگکیائو، طراح ارشد مأموریت HX-1، این محموله در فاصلهی ۷۰ متری از سطح سیارهی سرخ از کپسول جدا میشود. پس از جدا شدن، سطحنشین در حالت شناور قرار گرفته و به جستجوی محلی امن برای فرود میپردازد. برای تشخیص عوارض زمین، از اسکن لیزری سهبعدی جهت تعیین ارتفاع سطوح مختلف استفاده میشود. پس از کاهش ارتفاع تا ۲۰ متر، دوربینهای بصری نیز وارد عمل میشوند و سطحنشین وارد وضعیت احتراز از عوارض سطحی میشود. در این ویدئو از لحظهی فرود Chang'e-4 روی سطح ماه، استفاده از ویژگی احتراز از عوارض سطحی بهخوبی مشهود است.
فرود کاوشگر Chang'e-4 بر نیمهی پنهان ماه
منطقهی فرود
چینیها در ابتدا دو ناحیهی بزرگ را برای انتخاب منطقهی فرود در نظر گرفتهبودند. اکنون این انتخابها به دو منطقهی اصلی محدود شده است. براساس توضیحات ارائهشده در کنفرانس علوم سیارهای اروپا در سپتامبر سال گذشته در شهر ژنو، یکی از این منطقهها در ناحیهای از ماه بهنام Utopia Planitia است. پروفسور آلفرد مکاون، مدیر آزمایشگاه پژوهشهای تصویربرداری سیارهای در دانشگاه آریزونا، تصویری از این منطقه را تهیه کرده که مشاهده میکنید.
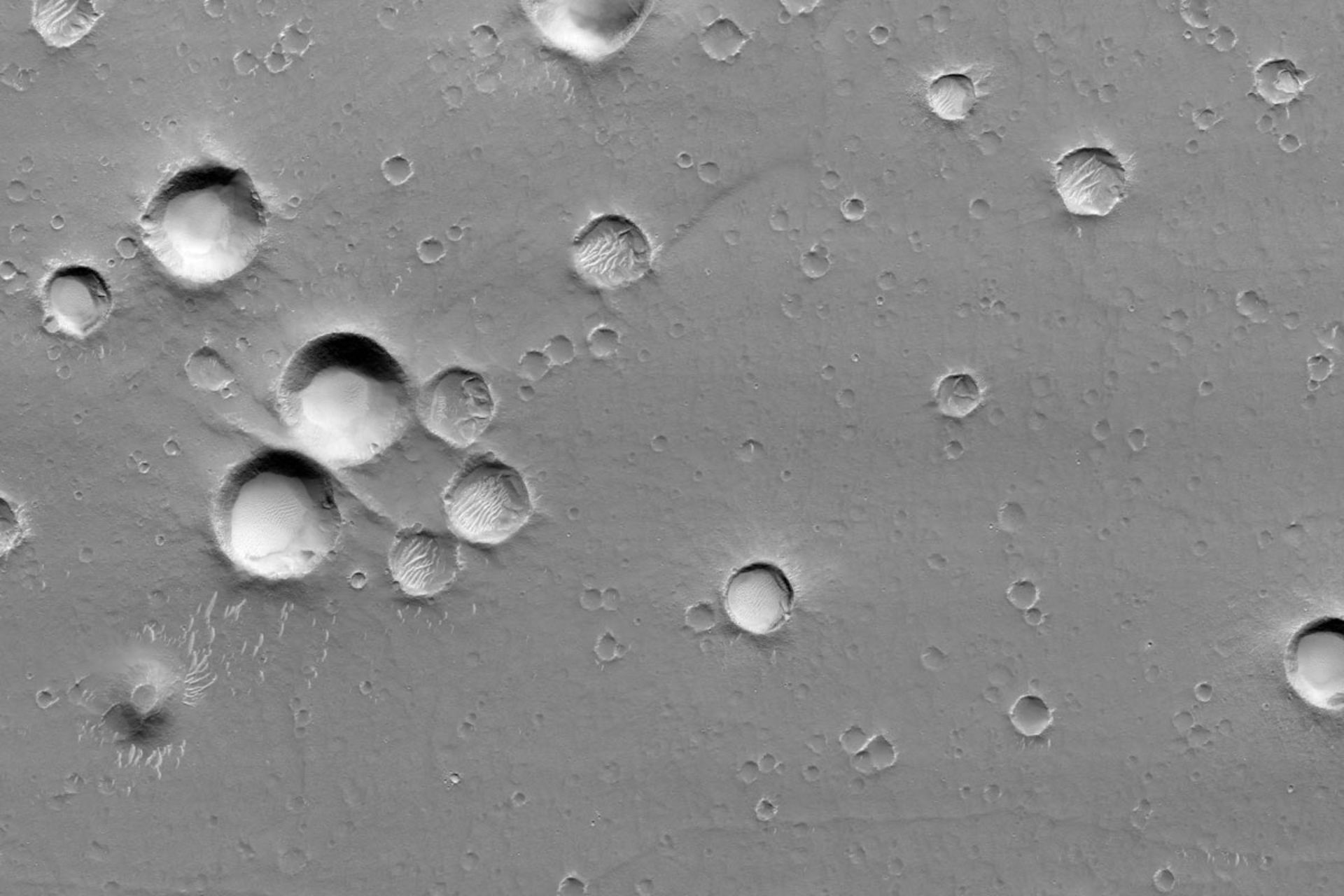
تصویر Utopia Planitia
پروفسور مکاون در رابطه با این منطقه میگوید:
براساس تصاویر تهیهشده توسط دوربین HiRISE (دوربین نصبشده روی مدارگرد شناسایی مریخ)، بخش زیادی از این منطقه از سطوح صاف تشکیلشده و برآمدگیها و فرورفتگیهای معدودی در این بخش وجود دارند که میتوان با فناوری احتراز از موانع در مرحلهی نهایی، از فرود روی این سطوح خطرناک هم جلوگیری کرد. جریانهای خاکی نیز بهطور گسترده لایههای جدیدی بر سطح Utopia Planitia ایجاد کردهاند. درنتیجه، این منطقه مکان خوبی برای بررسی امکان زیستپذیری است که شاید در گذشته و در لایههای زیرین وجود داشته است.
منطقهی احتمالی دیگر برای فرود، منطقهای موسوم به Chryse Planitia است. جالب این است که این منطقه نزدیک به منطقهی فرود کاوشگرهای وایکینگ ۱ و پثفایندر (Pathfinder) است. وظیفهی تعیین احتمال وقوع طوفانهای گردوغبار در مناطق انتخابی فرود هم برعهدهی دانشمندان مؤسسهی علوم فضایی در دانشگاه شندونگ بوده است.
فارغ از اینکه کدام منطقه برای فرود انتخاب میشود، محدودهای بهعنوان محدودهی احتمالی فرود به طول و عرض ۱۰۰ در ۴۰ کیلومتر در نظر گرفته میشود. این ابعاد مربوط به محدودهای است که براساس تحلیلهای آماری، احتمال فرود کاوشگر در آن وجود دارد. در مقایسه، بهلطف «فناوری شناسایی محدوده» ناسا و تجربهی بیشتر این سازمان در فرود روی مریخ، ابعاد محدودهی احتمالی فرود کاوشگر Perseverance تنها ۲۵ در ۲۰ کیلومتر است.
چینیها دیگر بخشهای لازم برای انجام مأموریت خود را هم فراموش نکردهاند. ایستگاههای ردگیری در سراسر چین و همچنین در نامیبیا و آرژانتین در حال فعالیت هستند. راکت لانگمارچ ۵ نیز در ماه ژانویه آزمون پیشرانهای خود را پشت سر گذاشتهاست و مریخنورد هم در حال طی کردن آزمونهای محیطی نهایی است. در این آزمونها، شرایط تجربه شده در لحظهی پرتاب، سفر در فضا و حرکت روی سطح مریخ شبیهسازی میشوند. قدم بزرگ بعدی پس از پرتاب محموله از پایگاه فضایی ونچنگ در ماه ژوئیه، فرود روی سطح ماه در سال ۲۰۲۱ است.
ویدئویی از فرایند پرتاب تا فرود کاوشگر HX-1 روی سطح مریخ