دیپ مایند مسیریابی را شبیه به انسانها به هوش مصنوعی یاد میدهد



همکاران گوگل در موضوع هوش مصنوعی، مهندسان حرفهای دیپ مایند بار دیگر توانستند مرزهای نوآوری را در حوزهی جدید دنیای فناوری جابهجا کنند. آنها این بار سیستمی توسعه دادند که خودروهای خودران با استفاده از آن خواهند توانست مانند انسانها، با شنیدن دستورها، مسیریابی کنند.
سالها پیش، در زمانیکه هنوز هیچیک از مهندسان نوجوان و جوان نسل هزاره بهدنیا نیامده بودند، مردم بدون ردیابهای GPS رانندگی میکردند. آنها اگر میخواستند به مقصدی مشخص بروند، از نقشه استفاده میکردند. روش دیگر، پیروی از دستورهای مسیریابی بود که از افراد دیگر دریافت میکردند.
روشهای سنتی که با جهتدهی مرحله به مرحله، آدرس و مسیر را به افراد میدادند، گاهی اوقات آسانتر هم بودند. بهنظر میرسد انسانها در به یاد سپردن چند دستور پشت سر هم استعداد خوبی دارند و بهراحتی آنها را حفظ میکنند. بهعنوان مثال اگر روی یک برگه، آدرس مسیری را بهصورت دستوراتی همچون پیچیدن به راست، رد کردن خیابان، چند قدم حرکت کردن و موارد مشابه دریافت کنید، با دقت بالایی به مقصد میرسید.
هوش مصنوعی، توانایی درک دستورها بهصورت بالا را نداشت. درمقابل، هوش انسانی در تمامی مراحل زندگی با دستورها تربیت شده است. اگر نگاهی به تجربههای پیشین خود در زندگی داشته باشید، قطعا چنین دستوراتی را به یاد میآورید که نهتنها در بحث مکانیابی یا آدرسدهی، بلکه در تمامی شرایط زندگی صادق هستند.
دیپمایند در پروژههای تحقیقاتی خود بهدنبال روشی بود تا به هوش مصنوعی نیز توانایی درک دستورهای مسیریابی را بدهد. سال گذشته، آنها توانستند از بخش نمای خیابانی Google Map، روشی را برای آموزش هوش مصنوعی توسعه دهند. از آنجایی که خودروهای خودران نباید بدون آموزش و شناخت محیط به شهرها وارد شوند، دیپمایند نیز تلاش کرد تا با ایجاد محیطی آموزشی، شرایط حرکت را برای آن نوع از خودروها آسانتر کند.
با درک دستورهای مسیریابی، رسیدن به مقصد آسانتر میشود
تحقیقات سال گذشتهی دیپمایند به این نتیجه رسید که خودروی خودران با بزرگنمایی تصاویر متعدد و جستوجو برای مقصد، مسیر خود را پیدا میکرد و از نقطهی A به B میرفت. چنین روش مسیریابی، با رانندگی مجازی در محیط نقشه و پیدا کردن تصویر مقصد انجام میشد. این روش، تنها زمانی کاربرد دارد که بخواهید روندی شبیه به پخش موسیقی تصادفی در اسپاتیفای را در حالت نقشه پیاده کنید. درواقع، اعتماد زیادی به آن نیست و برای مقاصد واقعی کاربرد آنچنانی ندارد.
اکنون دیپمایند به فناوری دست یافته است که هوش مصنوعی با استفاده از آن میتواند دستورهای مسیریابی را در فضای دید خیابانی نقشههای گوگل پیاده کند. گروه مذکور، محیط آموزشی با نام StreetNav طراحی کرد. سپس وظایف بسیاری آماده شدند که هوش مصنوعی با استفاده از آنها میتواند مسیریابی درون محیط را بیاموزد.
آموزش بر پایه تصویر و دستورهای مسیریابی
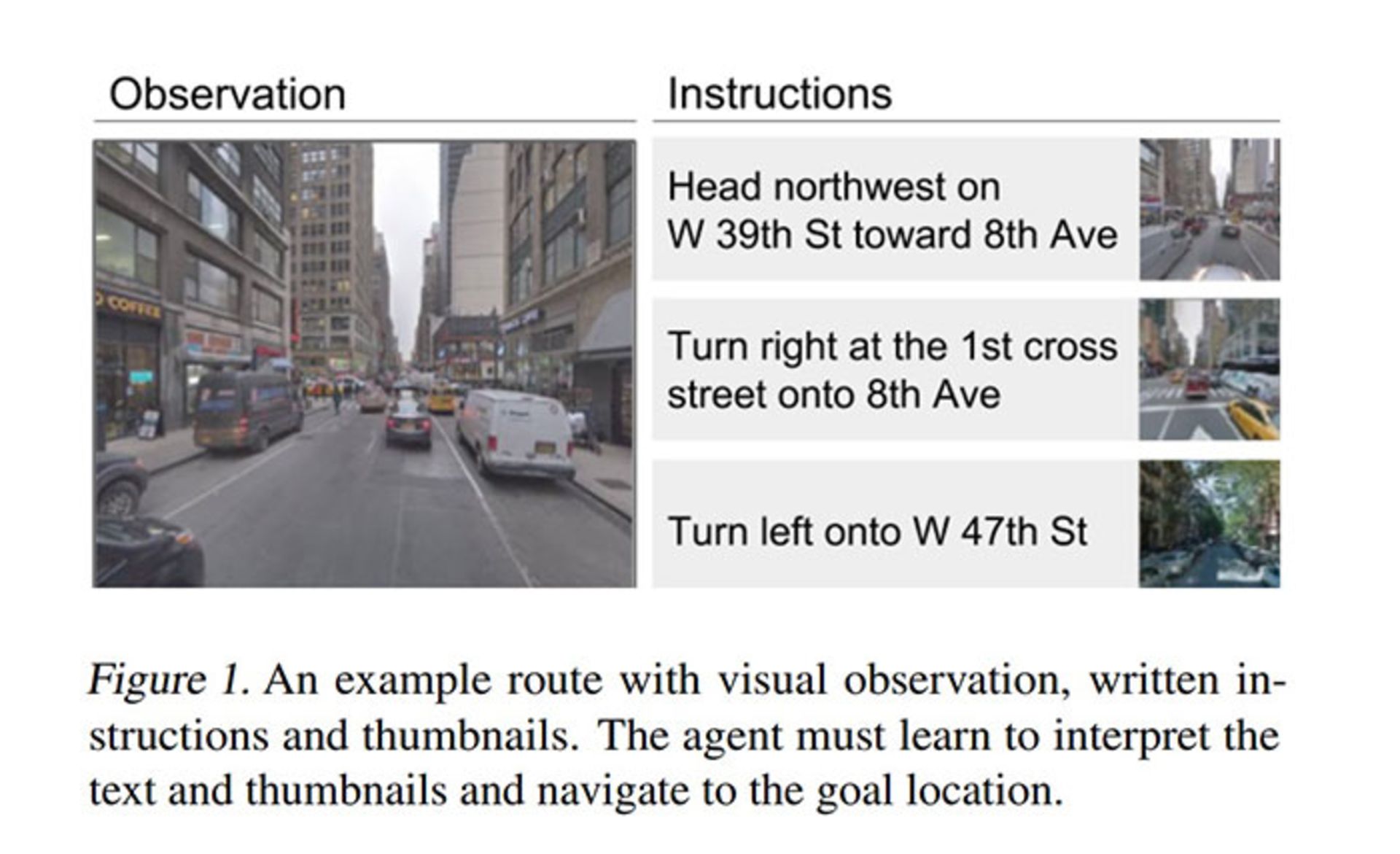
آموزشهای اولیه در محیطهایی از شهر نیویورک انجام شد. با استفاده از پارامترهای متنوع، گروه تحقیقاتی چند دستور مسیریابی را به هوش مصنوعی داد و در صورت پایان دادن صحیح دستورها و رسیدن به مقصد مورد نظر، جایزهای را به آن اهدا میکرد. شایان ذکر است این تحقیقات در مسیر بازیهای ویدئویی یا شبیهسازهای رانندگی نیستند. هوش مصنوعی دیپمایند در مدلهای ترافیکی یا با شرایط آبوهوایی گوناگون آموزش نمیبیند. آنها تنها تلاش میکنند تا با ایجاد محیطی معمولی، درک واقعی از دستورهای مسیریابی را به هوش مصنوعی آموزش دهند.
درحالحاضر، هیچ نوع خدمات تاکسی یا خودروی شخصی بدون رانندهای در جهان وجود ندارد که کاربر بتواند بدون دانستن آدرس و تنها با گفتن دستورهای مسیریابی، به مقصد خود برسد. برای رسیدن به آن فناوری، ابتدا باید چگونگی درک و پیروی از دستورها را به هوش مصنوعی آموزش داد. بههرحال، مقالهی منتشر شده از آزمایشهای دیپ مایند نشان میدهد که کارگزار هوشمند آنها عملکرد مناسبی در یادگیری نداشته است. در آن مقاله میخوانیم:
فاصلهی عملکرد واقعی کارگزار هوشمند با انتظارات ما آنچنان بالا است که قطعا میدانیم مسیری طولانی در پیش داریم و کارهای زیادی باید انجام شود.
البته، جملهی بالا، اثباتی بر موفق نشدن گروه دیپمایند نیست. مدلهای هوش مصنوعی تحت آموزش آنها، توانستند دستورهای آموختهشده در منطقهای از نیویورک را در مسیریابی مناطقی دیگر از شهر پیاده کنند؛ مناطقی که قبلا هیچ آموزشی در آنها ندیده بودند. بهعلاوه، آموزشها در شهر پیترزبورگ هم انجام شد که هوش مصنوعی مذکور، هیچ آموزشی در آنجا ندیده بود. نتایج در شهر دوم نیز قابل قبول بودند. بههرحال، نتایج مذکور نوعی مرجع برای آموزشهای آتی و تشکیلدهندهی قدمهای اولیه در رسیدن به هوشی توانا در مسیریابی هستند.
درنهایت، کارشناسان امیدوار هستند که تحقیقات اینچنینی به دنیایی ختم شود که ما برای ارتباط با یک ربات، نیازی به عمل کردن شبیه به رباتها نداشته باشیم. بهاحتمال زیاد پیشرفتهای اخیر دیپمایند مسیر را برای تجربهی رانندگی بدون رانندهی طبیعیتر هموار خواهند کرد.

نظرات