تکنولوژی واقعیت افزوده در خدمت مبتلایان به کمبینایی پیشرونده


التهاب رنگدانهای شبکیه یا رتینیت پیگمنتوزا (Retinitis pigmentosa یا RP) نام عمومی گروهی از بیماریهای پیشروندهی عمدتا وراثتی است که در اغلب موارد به نابینایی بیمار منتهی میشوند. دژانرهشدن و مرگ تدریجی سلولهای نوری در این بیماری کاهش دید در شب یا نور کم را بهدنبال دارد و در مراحل پیشرفتهتر، به کاهش دید محیطی (جانبی) بیمار منجر میشود. اغلب مبتلایان در مراحل پیشرفتهتر این بیماری امکان تشخیص موانع و فواصل نسبی آنها را بهویژه در نور کم ندارند و به استفاده از عصا ناچار هستند. ازآنجاکه تاکنون روش درمان قطعی برای این دسته از بیماریها ارائه نشده، بخشی از تلاشهای پژوهشگران همچنان معطوف به ابداع روشهایی برای استفاده از تکنولوژیهای روز بهمنظور بهبود قدرت بینایی مبتلایان است.

کاهش میدان دید و وضوح و روشنایی تصاویر در مراحل پیشرفتهی بیماری RP
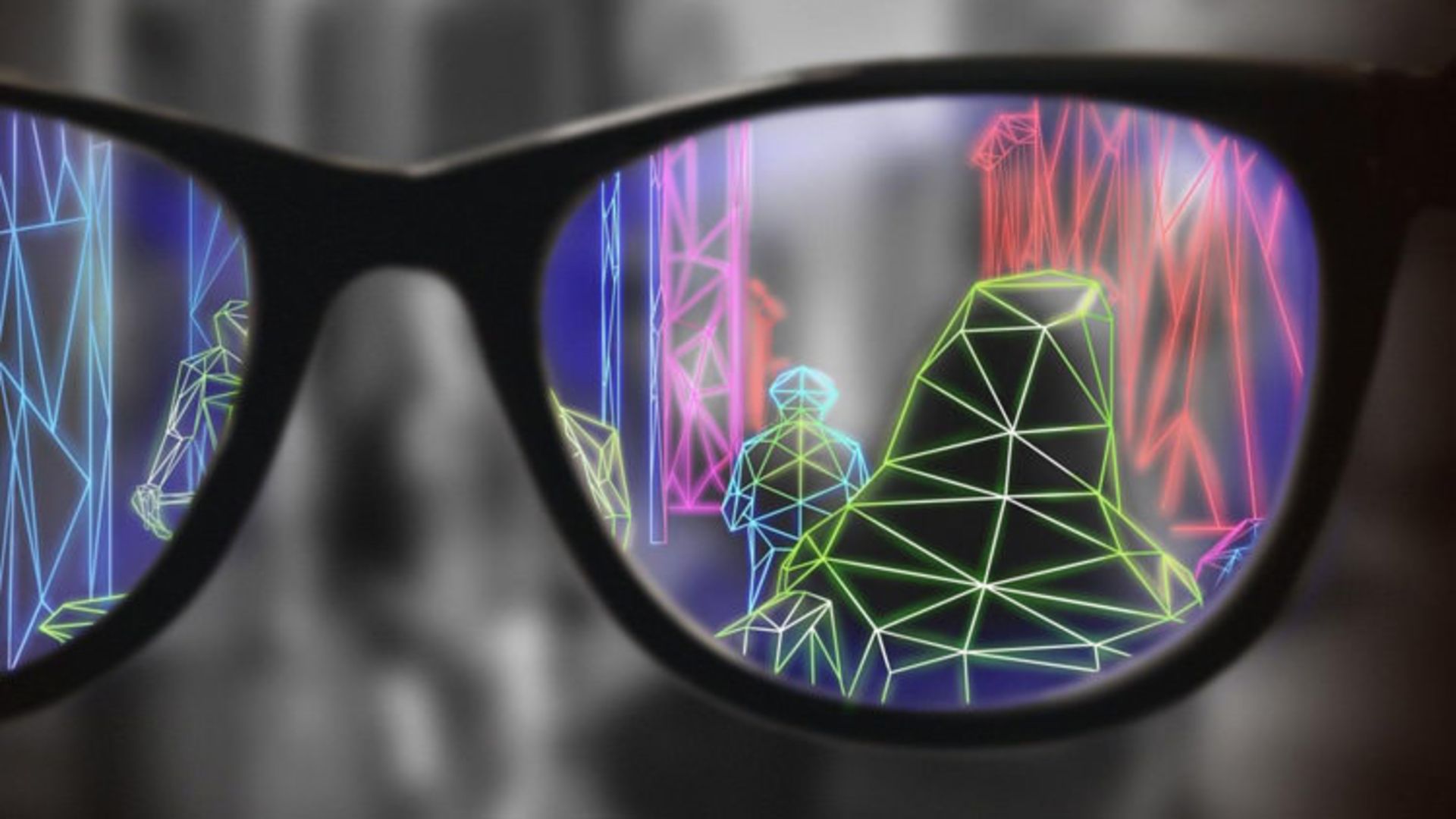
اخیرا گروهی از محققان دانشگاه کارولینایجنوبی به سرپرستی پروفسور آناستازیوس انجلوپولوس، نرمافزاری برای هولولنز ۱ طراحی کردهاند که موانع دنیای واقعی را بهصورت حجمهایی متشکل از مشهای مثلثی و به رنگهایی که معرف فاصله مانع تا کاربر است، نمایش میدهد. محاسبات ریاضی مربوط به محل قرارگیری رئوس مثلثها و چگونگی اتصال آنها را الگوریتم SLAM داخلی هولولنز انجام میدهد و نرمافزار رنگ هر قسمت از مش را بسته به میزان فاصلهی مانع تا کاربر و برمبنای دادههای دوربین تشخیص عمق تعبیهشده در لبهی بالایی هولولنز تنظیم میکند. SLAM یا Simultaneous Localization and Mapping بهمعنای مکانیابی و نقشهبرداری همزمان است. در سیستمهای کامپیوتری، رباتها، پهپادها یا اتومبیلهای خودران، حل مسئلهی SLAM بهمعنای ارائهی الگوریتمها و روشهای محاسباتی بهمنظور شناسایی محیط کاملا ناشناختهی اطراف سیستم متحرک و تعیین همزمان موقعیت مکانی ازپیشنامعلوم سیستم در این محیط است.
برای مثال، در مد Mobility که هدف، جلوگیری از برخورد بیمار با موانع موجود در مسیر است، اشیائی که در فاصلهی کمتر از ۰.۹ متری دوربین قرار دارند، به رنگ سفید نمایش داده میشوند. همچنین، اشیائی که در فاصلهی بیش از ۰.۹ و کمتر از ۱.۲ متری دوربین قرار دارند، به رنگ سبز به تصویر کشیده میشوند و اشیائی که در فاصلهی ۱.۲ تا ۱.۵ متری دوربین قرار دارند، به رنگ آبی نشان داده میشوند و اشیائی که در فاصلهی ۱.۵ تا ۱.۸ متری دوربین قرار دارند، به رنگ قرمز نمایش داده میشوند.
افزونبراین، در مد Grasp که هدف، افزایش توانایی بیمار در تشخیص اشیاء و بهدستگرفتن آنها است، اشیائی که در فاصله کمتر از ۱۵.۲ سانتیمتری قرار دارند بهرنگ سفید نشان داده میشوند و اشیائی که در فاصلهی ۱۵.۲ تا ۳۰.۵ سانتیمتری دوربین قرار دارند، به رنگ سبز به نمایش درمیآیند. همچنین، اشیائی که در فاصلهی ۳۰.۵ تا ۴۵.۷ سانتیمتری دوربین قرار دارند، به رنگ آبی به تصویر کشیده میشوند و اشیائی که در فاصلهی ۴۵.۷ تا ۶۱ سانتیمتری دوربین قرار دارند، به رنگ قرمز نمایش داده میشوند.
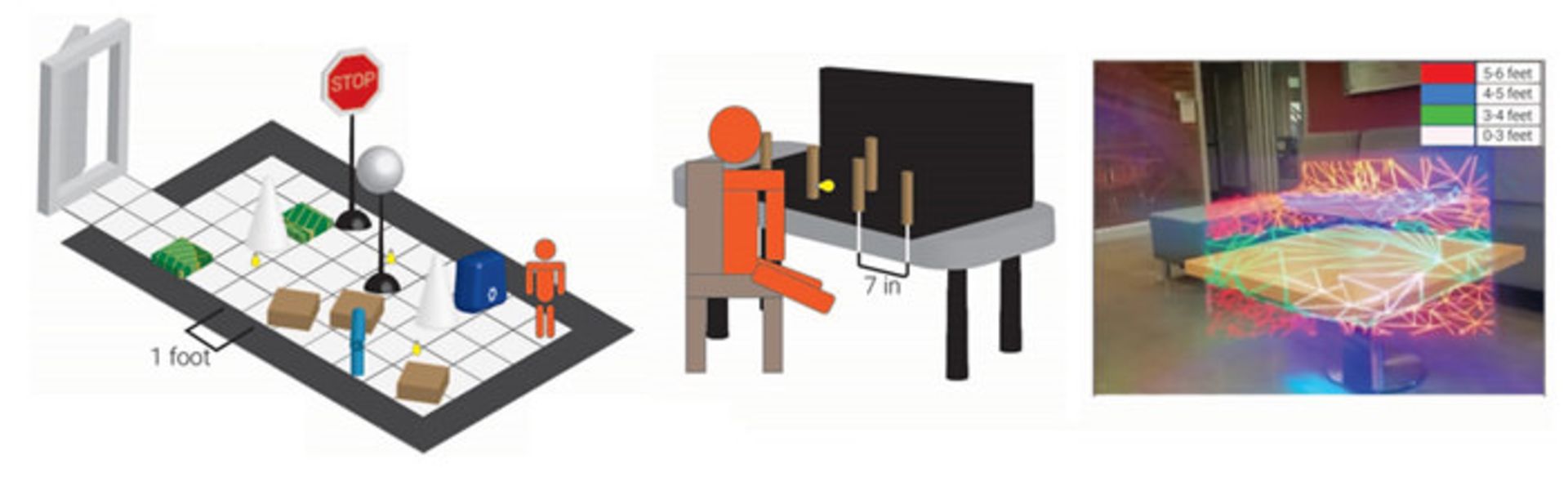
راست: رنگ وایرفریم قرارگرفته روی تصویر معرف فاصلهی جسم از کاربر است، وسط: تست مد Grasp، چپ: تست مد Mobility
تابستان ۲۰۱۸، این سیستم روی ۱۰ بیمار مبتلا به RP آزمایش شد و در تست عبور از میان موانع که به تأیید سازمان غذا و داروی آمریکا نیز رسیده است، استفاده از هدست در مد Mobility، کاهش ۵۰ درصدی برخورد بیماران با موانع را بهدنبال داشت. همچنین& برای تست عملکرد سیستم در مد Grasp، از بیماران خواسته شد میلهای چوبی را که پشت چهار میلهی دیگر و درمقابل پسزمینهای به رنگ سیاه قرار داشت، بدون برخورد دست با میلههای جلویی بردارند. استفاده از هدست در مد Grasp نیز، توانایی بیمار در تشخیص اشیاء و دردستگرفتن آنها را تا ۷۰ درصد بهبود بخشید.
پروفسور انجلوپولوس امیدوار است بهکارگیری تکنولوژی واقعیت افزوده به افزایش اعتمادبهنفس مبتلایان به RP در انجام امور شخصی روزمره منجر شود و پیشرفتهای آتی در این حوزه، امکان زندگی مستقل را برای مبتلایان فراهم آورد.

نظرات