ربات اختاپوسی که میتواند به نخستین نسل سافتباتها تبدیل شود

مهندسان دانشگاه هاروارد ربات اختاپوس جدیدی به نام «Octobot» را طراحی کردهاند که تماما از مواد نرم تهیه شده است و برای انجام عملیات نیازی به هدایت انسان ندارد. برای ساخت این ربات از پرینت سهبعدی، مهندسی مکانیک و علم میکروسیالها استفاده شده است. اکتابات میتواند به نخستین نسل از سافترباتهای خودران تبدیل شود.
اگر قرار است یک سافتربات ایجاد کنید؛ الگوبرداری از اختاپوس ایدهی بدی نیست. اختاپوسها باهوشترین گونه از نرمتنان هستند و از پیشرفتهترین بیمهرگان به حساب میآیند. اختاپوسها مهارت بینظیری در فریب سایر حیوانات دارند و فاقد بخشهای سخت هستند. این جزئیات رباتی ایدهآل را خواهد ساخت که میتواند پای خود را از کرمهای مکانیکی فراتر بگذارد. با این وجود برای ساخت یک سافتربات به چیزی بیشتر از انتخاب یک گونهی حیوانی برای الگوبرداری نیاز دارید.
نسل فعلی سافترباتها در اصل کاملا نرم نیستند. بسیاری از آنها قطعات الکترونیکی سخت (مانند سیمهای حرارتی، باتری، بردهای مدار و سیستمهای کنترل) را حمل میکنند. همچنین بسیاری از آنها به نوعی قدرت بیرونی و منبع کنترل متصل هستند.

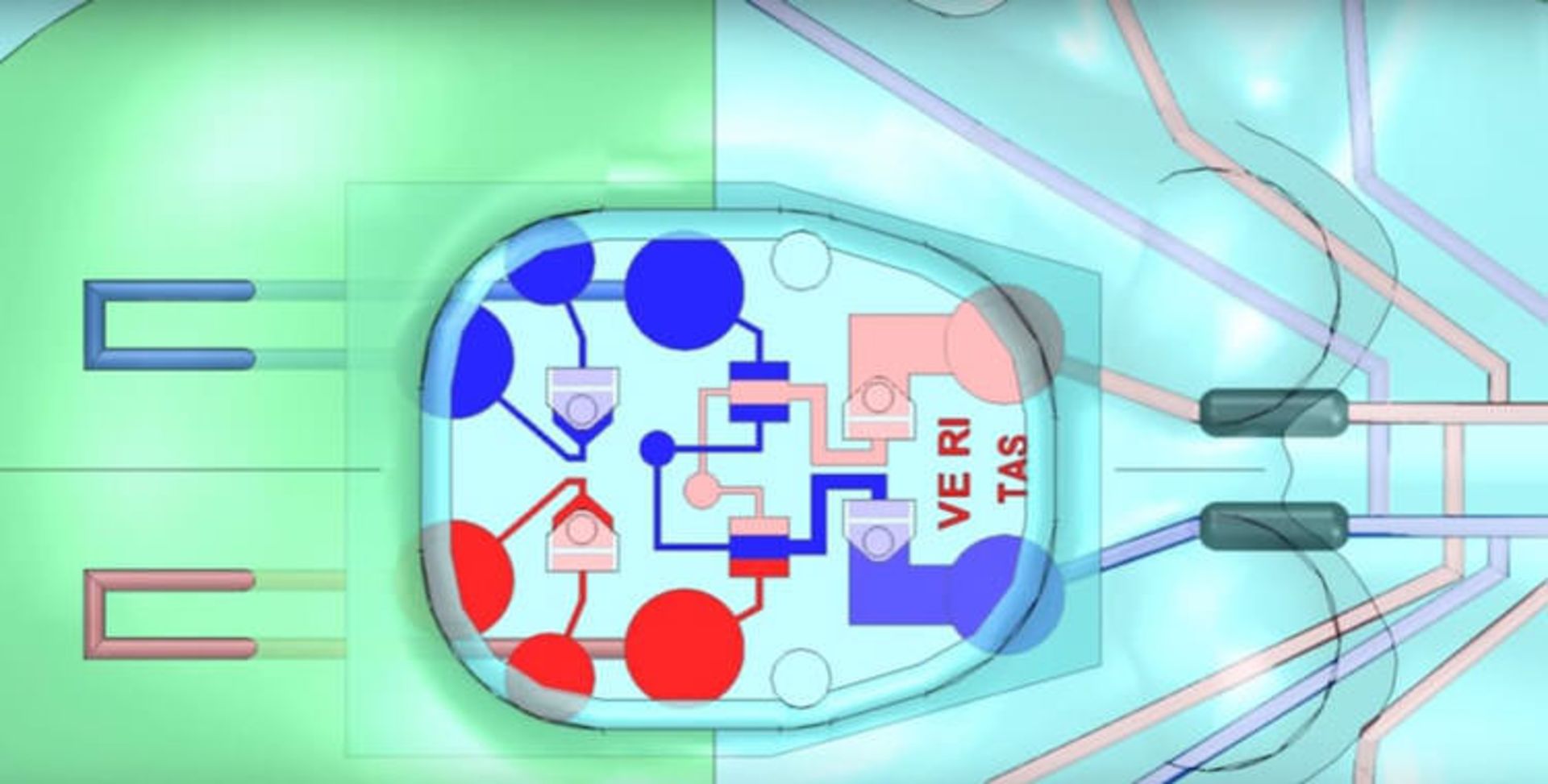
برای حل این مشکلات، تیمی به رهبری محققان دانشگاه هاروارد، «رابرت وود» و «جنیفر لوییس»، اکتابات را طراحی کردهاند. رباتی که نه تنها اسکلت داخلی ندارد بلکه از فشار هوا برای جابجایی استفاده خواهد کرد. برای این کار اکتابات به یکسری تیوب حاوی آب اکسیژنه مجهز شده است.
زمانی که آب اکسیژنه با پلاتین به عنوان کاتالیست مواجه شود؛ به بخار آب و اکسیژن تجزیه خواهد شد. با گسترش این ترکیب در داخل ربات؛ پاهای اختاپوس به حرکت درمیآیند. نکتهی مهم در اینجا است که این واکنش توسط قطعات الکترونیکی سخت کنترل نمیشود. بلکه یک نوسانساز نرم آنالوگ حرکات ربات را کنترل و رهبری خواهد کرد.
اکتابات توسط پروسهای از مونتاژ هایبرید و ترکیبی از لیتوگرافی، قالبریزی و پرینت سهبعدی ساخته شده است. پرینت سهبعدی به مهندسان اجازه میدهد که محفظهی سوخت، انرژی و سیستم شروعکننده را به شکل مستقیم در داخل ربات چاپ کنند و به یک طراحی یکپارچه دست یابند.
تیم طراحی اکتابات امیدوار است که این مفهوم اولیه؛ به طراحی نسخههای پیچیدهتری از آن بیانجامد. هرچند در حال حاضر آنها در حال پیدا کردن راهی هستند که بتوانند ربات را به شنا کردن و تعامل با محیط اطراف وادار کنند.
رابرت وود میگوید: «یکی از چشماندازهای طولانیمدت سافترباتیک، ساخت رباتی کاملا نرم بوده است. بزرگترین مشکل در این راه جایگزین کردن قطعههای سخت مانند باتری و کنترلهای الکتریکی با سیستمهای آنالوگ و سافت است که بتوانند نیازهای ربات را برطرف کنند. این تحقیق نشان میدهد که میشود قطعات اصلی یک ربات نرم را به راحتی تهیه کرد؛ و نقطهی شروعی برای طراحی نسخههای پیچیدهتر خواهد بود.»


نظرات